Introduction to Adaptive Finite Element Methods
Adaptive methods are now widely used in the scientific computation to achieve better accuracy with minimum degree of freedom. We present an example here and refer to the lecture notes Adaptive Finite Element Methods for a convergence analysis.
Documentation on bisection and coarsening for 2D triangulation can be found below:
Singularity
In FEM, we have obtained a first order convergence of the linear finite element approximation to the Poisson equation
\[-\Delta u = f \quad \text{in } \Omega, \qquad u=0 \quad \text{ on } \partial \Omega,\]provided that the solution $u\in H^2(\Omega)$. Here is an example such regularity result does not hold.
Let $\Omega:= (-1,1)^2 \backslash {[0,1)\times(-1,0]}$ be an L-shaped domain with a re-entrant corner. Consider the equation
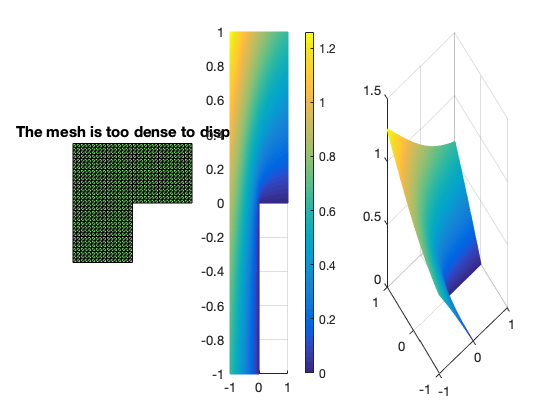
\[-\Delta u = 0, \text{ in } \Omega \quad \text{ and } \; u=g \text{ on } \partial \Omega,\]We choose the Dirichlet boundary condition $g$ such that the exact solution reads
\[u(r,\theta) = r^{\frac{2}{3}}\sin(\frac{2}{3}\theta),\]in the polar coordinates. Then $u\in H^s$ for $s<5/3$.
%% Generate an initial mesh of the Lshape domain and set PDE data
[node,elem] = squaremesh([-1,1,-1,1],0.25);
[node,elem] = delmesh(node,elem,'x>0 & y<0');
bdFlag = setboundary(node,elem,'Dirichlet');
mesh = struct('node',node,'elem',elem,'bdFlag',bdFlag);
showmesh(node,elem);
pde = Lshapedata;
% Solve Poisson equation by the linear FEM
femPoisson(mesh,pde);
Multigrid V-cycle Preconditioner with Conjugate Gradient Method
#dof: 3201, #nnz: 14473, smoothing: (1,1), iter: 9, err = 7.57e-09, time = 0.09 s
Multigrid V-cycle Preconditioner with Conjugate Gradient Method
#dof: 12545, #nnz: 59657, smoothing: (1,1), iter: 10, err = 1.35e-09, time = 0.11 s
#Dof h ||u-u_h|| ||Du-Du_h|| ||DuI-Du_h|| ||uI-u_h||_{max}
225 7.143e-02 6.55149e-03 1.13956e-01 4.35355e-02 2.01109e-02
833 3.589e-02 2.69513e-03 7.29268e-02 2.77815e-02 1.30302e-02
3201 1.799e-02 1.09785e-03 4.64100e-02 1.75876e-02 8.29780e-03
12545 9.009e-03 4.43931e-04 2.94264e-02 1.11008e-02 5.24950e-03
#Dof Assemble Solve Error Mesh
225 6.00e-02 1.00e-02 9.00e-02 2.00e-02
833 3.00e-02 0.00e+00 2.00e-02 2.00e-02
3201 7.00e-02 9.00e-02 4.00e-02 0.00e+00
12545 1.50e-01 1.10e-01 1.00e-01 6.00e-02
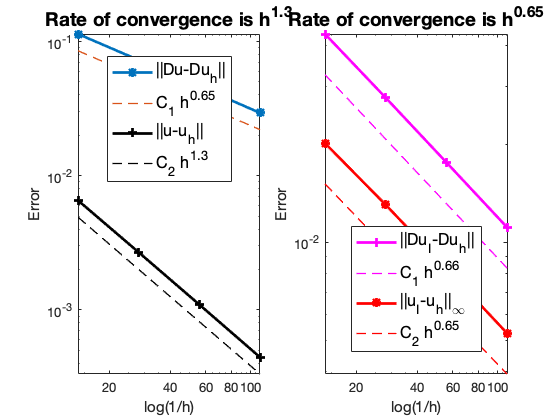
When $u\in H^{1+\epsilon}(\Omega)$ with $\epsilon \in [0,1]$, in view of the approximation theory, we cannot expect the finite element approximation rate $|\nabla (u-u_h)|$ better than $h^{\epsilon}$ if we insist on quasi-uniform grids. For the Lshape problem above, we expect the rate of convergence is less than $2/3 \approx 0.67$ which is confirmed by the numerical example.
Adaptive Procedure
Standard adaptive finite element methods (AFEM) based on the local mesh refinement can be written as loops of the form
SOLVE -> ESTIMATE -> MARK -> REFINE
Starting from an initial triangulation $\mathcal T_0$, to get $\mathcal T_{k+1}$ from $\mathcal T_k$ we first solve the equation to get $u_k$ based on $\mathcal T_k$. The error is estimated using $u_k$ and $\mathcal T_k$ and used to mark a set of of triangles in $\mathcal T_k$. Marked triangles and possible more neighboring triangles are refined in such a way that the triangulation is still shape regular and conforming.
Example: Lshape.m
%% Parameters
maxN = 5e4; theta = 0.4; maxIt = 100;
N = zeros(maxIt,1);
errL2 = zeros(maxIt,1);
errH1 = zeros(maxIt,1);
erreta = zeros(maxIt,1);
%% Generate an initial mesh and set up PDE data
[node,elem] = squaremesh([-1,1,-1,1],0.5);
[node,elem] = delmesh(node,elem,'x>0 & y<0');
bdFlag = setboundary(node,elem,'Dirichlet');
pde = Lshapedata;
%% Adaptive Finite Element Method
% *SOLVE* -> *ESTIMATE* -> *MARK* -> *REFINE*
for k = 1:maxIt
% Step 1: SOLVE
[soln,eqn,info] = Poisson(node,elem,bdFlag,pde);
figure(1); showresult(node,elem,soln.u,[-50,12]);
% Step 2: ESTIMATE
% eta = estimaterecovery(node,elem,u); % recovery type
eta = estimateresidual(node,elem,soln.u,pde); % residual type
% Record error and number of vertices
N(k) = size(node,1);
errH1(k) = getH1error(node,elem,pde.Du,soln.Du);
errL2(k) = getL2error(node,elem,pde.exactu,soln.u);
erreta(k) = sqrt(sum(eta.^2));
if (N(k)>maxN), break; end
% Step 3: MARK
markedElem = mark(elem,eta,theta);
% Step 4: REFINE
[node,elem,bdFlag] = bisect(node,elem,markedElem,bdFlag);
end
%% Plot convergence rates
figure;
showrate3(N(1:k),errH1(1:k),10,'-*','||Du-Du_h||',...
N(1:k),errL2(1:k),10,'k-+','||u-u_h||',...
N(1:k),erreta(1:k),10,'m-x','\eta');
Multigrid V-cycle Preconditioner with Conjugate Gradient Method
#dof: 2231, #nnz: 10757, smoothing: (1,1), iter: 7, err = 4.05e-10, time = 0.14 s
Multigrid V-cycle Preconditioner with Conjugate Gradient Method
#dof: 2860, #nnz: 13804, smoothing: (1,1), iter: 7, err = 3.24e-10, time = 0.04 s
Multigrid V-cycle Preconditioner with Conjugate Gradient Method
#dof: 3631, #nnz: 17541, smoothing: (1,1), iter: 7, err = 4.38e-10, time = 0.07 s
Multigrid V-cycle Preconditioner with Conjugate Gradient Method
#dof: 4585, #nnz: 22285, smoothing: (1,1), iter: 7, err = 4.78e-10, time = 0.05 s
Multigrid V-cycle Preconditioner with Conjugate Gradient Method
#dof: 5785, #nnz: 28297, smoothing: (1,1), iter: 7, err = 4.25e-10, time = 0.05 s
Multigrid V-cycle Preconditioner with Conjugate Gradient Method
#dof: 7278, #nnz: 35678, smoothing: (1,1), iter: 7, err = 4.25e-10, time = 0.07 s
Multigrid V-cycle Preconditioner with Conjugate Gradient Method
#dof: 9197, #nnz: 45119, smoothing: (1,1), iter: 7, err = 3.97e-10, time = 0.09 s
Multigrid V-cycle Preconditioner with Conjugate Gradient Method
#dof: 11593, #nnz: 56969, smoothing: (1,1), iter: 7, err = 3.24e-10, time = 0.14 s
Multigrid V-cycle Preconditioner with Conjugate Gradient Method
#dof: 14554, #nnz: 71528, smoothing: (1,1), iter: 7, err = 2.37e-10, time = 0.14 s
Multigrid V-cycle Preconditioner with Conjugate Gradient Method
#dof: 18220, #nnz: 89844, smoothing: (1,1), iter: 7, err = 2.64e-10, time = 0.17 s
Multigrid V-cycle Preconditioner with Conjugate Gradient Method
#dof: 22768, #nnz: 112538, smoothing: (1,1), iter: 7, err = 3.79e-10, time = 0.19 s
Multigrid V-cycle Preconditioner with Conjugate Gradient Method
#dof: 28355, #nnz: 140379, smoothing: (1,1), iter: 7, err = 4.09e-10, time = 0.25 s
Multigrid V-cycle Preconditioner with Conjugate Gradient Method
#dof: 35409, #nnz: 175385, smoothing: (1,1), iter: 6, err = 9.01e-09, time = 0.38 s
Multigrid V-cycle Preconditioner with Conjugate Gradient Method
#dof: 44197, #nnz: 219071, smoothing: (1,1), iter: 6, err = 5.49e-09, time = 0.44 s
Multigrid V-cycle Preconditioner with Conjugate Gradient Method
#dof: 54960, #nnz: 272342, smoothing: (1,1), iter: 6, err = 5.12e-09, time = 0.47 s
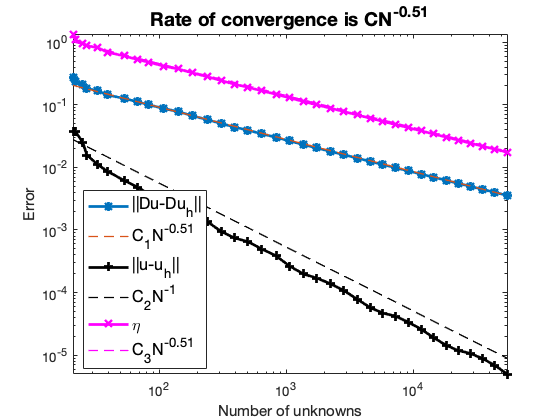
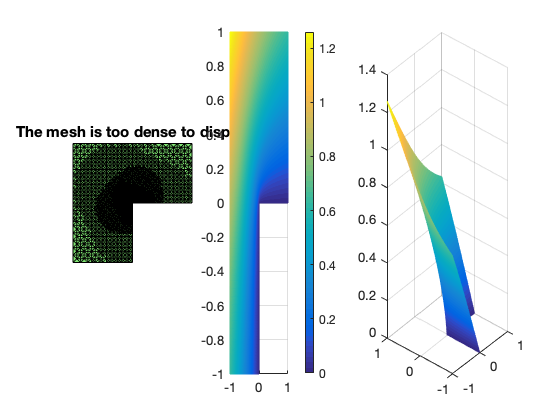
The solution has a sharp gradient near the origin and the adaptive FEM automatically refines the mesh near the singularity. Optimal rate of convergence in terms of number of unknowns, i.e.,
\[\|\nabla (u - u_h) \|\leq C N^{-0.5}\]is observed. For quasi-uniform meshes in 2D, $N^{-0.5} \approx h$ is first order. The a posteriori error estimator $\eta$ is an upper bound of the error and always decay in an optimal order. The $L^2$-norm of the error converges in second order.
Details of Each Step
SOLVE
We use direct solver A\b or multigrid solvers to solve the linear system Au=b. For meshes generated in ifem, mg(A,b,elem) is faster than amg(A,b).
ESTIMATE
We use the residual-type a posterior error estimator estimateresidual which returns
\(\eta(\tau,u_{\mathcal T})^2 = \|h f\|_{0,\tau}^2 + \sum _{e\in \partial \tau} \|h^{1/2}[\nabla u_{\mathcal T}\cdot n_e]\|_{0,e}^2.\)
Other option is estimaterecovery(node,elem,u) which only requres the mesh and a finite element function. Recovery type estimator is more flexiable but residual-type is more theoretical sound.
MARK
Let $\theta \in (0,1)$. We use the bulk marking strategy
\[\eta ^2(u_{\mathcal T},\mathcal M_{\mathcal T})\geq \theta \, \eta ^2(u_{\mathcal T},\mathcal T).\]Use markedElem = mark(elem,eta,theta,'max') for the maximum marking strategy
REFINE
We implement the newest vertex bisection and refer to Bisection in Two Dimensions for detailed description. In short, the bisection method will divide one triangle into two children triangles by connecting one vertex to the middle point of its opposite edge. The subtlety is to keep both the shape regularity and conformity of the mesh.
COARSEN
For some problems, e.g., evolution problems, coarsening (de-refinement) is needed as the singularity could move. Then use
- matlab
eta = eleminterpolate(eta,tree);
markedElem = mark(elem,eta,0.5*theta,'COARSEN');
[node,elem,bdFlag] = coarsen(node,elem,markedElem,bdFlag);
See Coarsen in two dimensions for the coarsening algorithm.
Comments